Terima Data dengan Sistem Pooling
Kebutuhan Komponen
- Sistem Minimum STM32F4Discovery 2 unit
- Kabel Jumper Male-Female secukupnya
Gambar Percobaan
Langkah Percobaan
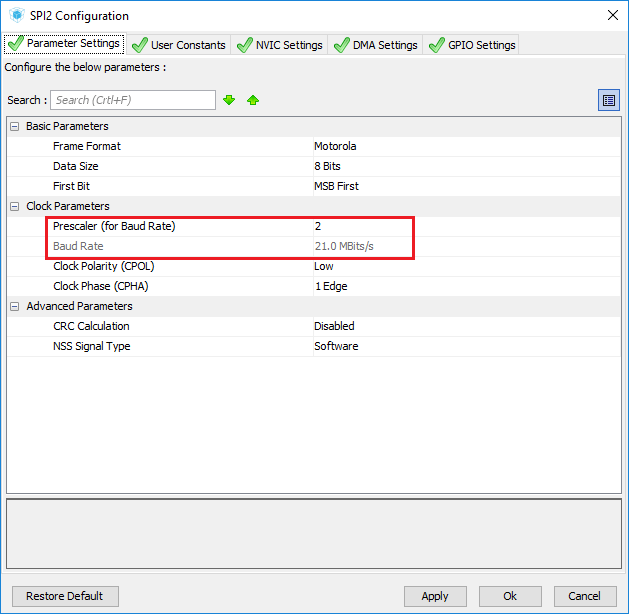
Buatlah program pada STM32F4Discovery yang berfungsi sebagai master. Aktifkan konfigurasi SPI2 dengan kecepatan transfer data 21.0Mbps seperti berikut ini
Simpan project Anda dengan nama STM32F4_SPI_Master_Send_Pooling, kemudian buka project menggunakan Keil MDK ARM 5.
Lakukan modifikasi program pada STM32F4Discovery yang berfungsi sebagai master menjadi seperti berikut ini
Ubahlah fungsi main menjadi seperti berikut iniint main(void) { // Deklarasi variabel yang akan dikirimkan ke STM32F4Discovery Slave uint8_t sendData[1]; /* MCU Configuration----------------------------------------------------------*/ /* Reset of all peripherals, Initializes the Flash interface and the Systick. */ HAL_Init(); /* Configure the system clock */ SystemClock_Config(); /* Initialize all configured peripherals */ MX_GPIO_Init(); MX_SPI2_Init(); /* Infinite loop */ while (1) { // Jika tombol user ditekan variabel sendData[0] bernilai 255 if(HAL_GPIO_ReadPin(B1_GPIO_Port,B1_Pin)==1) { sendData[0] = 255; } // Jika tombol user tidak ditekan variabel sendData[0] bernilai 0 else { sendData[0] = 0; } // Kirim variabel sendData ke SPI2 HAL_SPI_Transmit(&hspi2,sendData,1,1); } }Lakukan download program ke STM32F4Discovery yang berfungsi sebagai master
Buatlah program pada STM32F4Discovery yang berfungsi sebagai slave menggunakan STM32Cube MX. Aktifkan konfigurasi SPI2 dengan mode Full-Duplex Slave

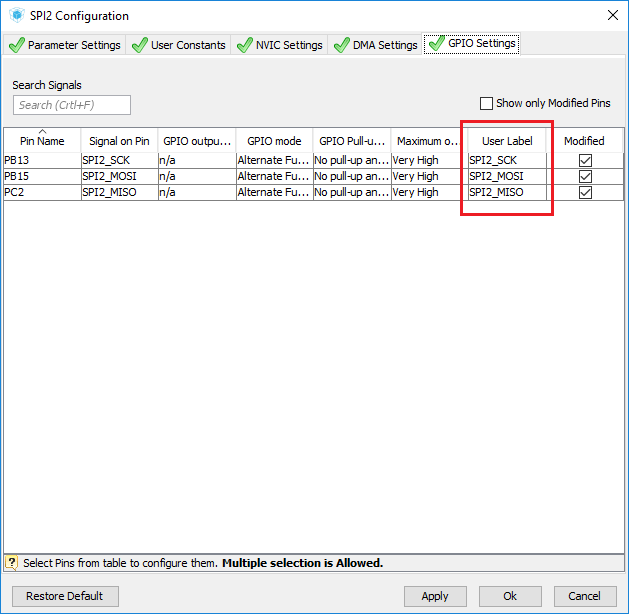
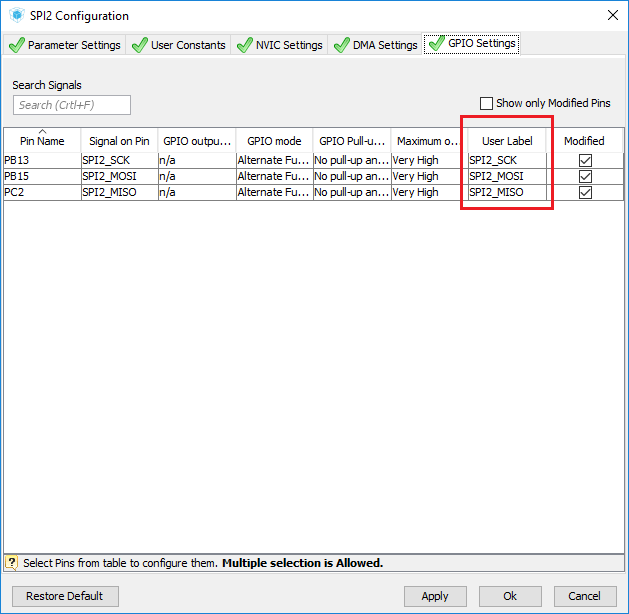
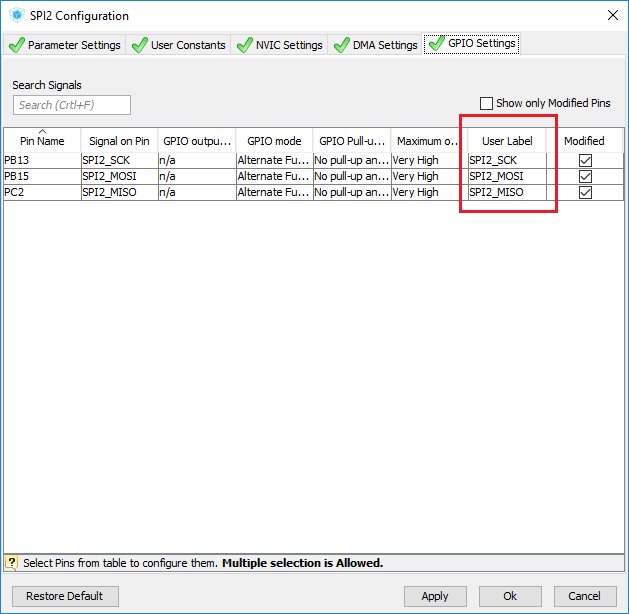
Pada menu SPI2 Configuration ubahlah User Label pada pin yang digunakan untuk komunikasi SPI
Simpan project Anda dengan nama STM32F4_Slave_Receive_Pooling dan buka menggunakan Keil
Lakukan modifikasi program pada file main.c manjadi berikut ini
Ubahlah fungsi main menjadi seperti berikut iniint main(void) { // Deklarasi variabel yang digunakan untuk menerima data uint8_t receivedData[1]; /* MCU Configuration----------------------------------------------------------*/ /* Reset of all peripherals, Initializes the Flash interface and the Systick. */ HAL_Init(); /* Configure the system clock */ SystemClock_Config(); /* Initialize all configured peripherals */ MX_GPIO_Init(); MX_SPI2_Init(); /* Infinite loop */ while (1) { // Menerima data dari SPI2 kemudian disimpan pada variabel receivedData HAL_SPI_Receive(&hspi2,receivedData,1,1); // Jika variabel receivedData[0] bernilai 255 // Nyalakan LED if(receivedData[0] == 255) { HAL_GPIO_WritePin(LD3_GPIO_Port,LD3_Pin,1); } // Jika variabel receivedData[0] bernilai 0 // Matikan LED else { HAL_GPIO_WritePin(LD3_GPIO_Port,LD3_Pin,0); } } }Lakukan kompilasi dan download program ke mikrokontroler. Hubungkan STM32F4Discovery master dan STM32F4Discovery slave sesuai koneksi pada gambar percobaan
Untuk melakukan ujicoba, tekan tombol pada mikrokontroler master dan perhatikan nyala LED pada mikrokontroler slave. Jika percobaan Anda benar, ketika tombol pada mikrokontroler master ditekan LED pada mikrokontroler slave akan menyala yang menandakan slave menerima data dari mikrokontroler master.
Terima Data dengan Sistem Interupsi
Kebutuhan Komponen
- Sistem Minimum STM32F4Discovery 2 unit
- Kabel Jumper Male-Female secukupnya
Gambar Percobaan
Langkah Percobaan
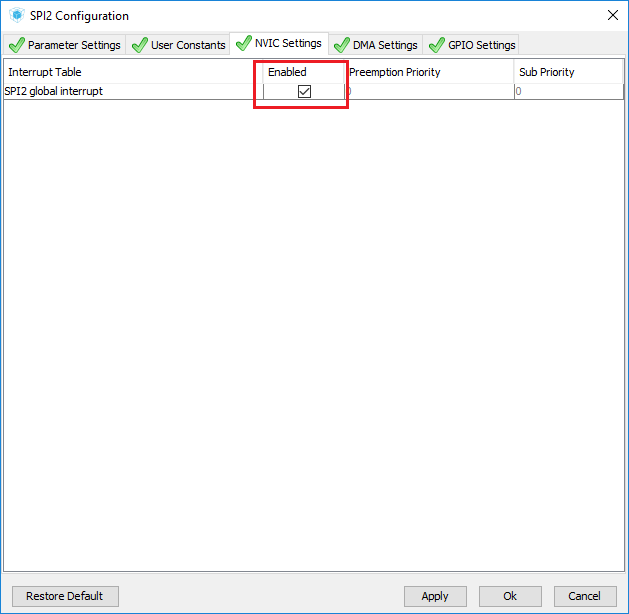
Buatlah project pada mikrokontroler master dengan mengaktifkan fitur SPI2 mode Full-Duplex Master. Aturlah konfigurasi pada SPI2 dengan kecepatan transfer data 21Mbps dan mengaktifkan SPI2 Global interrupt.


Simpan project Anda dengan nama STM32F4_SPI_Master_Send_Interrupt.
Lakukan modifikasi pada file main.c seperti berikut ini
Tambahkan program berikut ini pada fungsi mainint main(void) { // Inisialisasi variabel sendData uint8_t sendData[1]; /* MCU Configuration----------------------------------------------------------*/ /* Reset of all peripherals, Initializes the Flash interface and the Systick. */ HAL_Init(); /* Configure the system clock */ SystemClock_Config(); /* Initialize all configured peripherals */ MX_GPIO_Init(); MX_SPI2_Init(); /* Infinite loop */ while (1) { // Jika tombol user ditekan variabel sendData[0] bernilai 255 if(HAL_GPIO_ReadPin(B1_GPIO_Port,B1_Pin)==1) { sendData[0] = 255; } // Jika tombol user tidak ditekan variabel sendData[0] bernilai 0 else { sendData[0] = 0; } // Kirim variabel sendData ke SPI2 menggunakan interrupt HAL_SPI_Transmit_IT(&hspi2,sendData,1); } }Lakukan kompilasi program dan download program ke mikrokontroler master
Buatlah project baru pada mikrokontroler slave dengan mengaktifkan fitur SPI2 mode Full-Duplex Slave. Aktifkan mode SPI2 Global interrupt pada konfigurasi SPI2.


Simpan project Anda dengan nama STM32F4_SPI_SLave_Receive_Interrupt
Lakukan modifikasi program pada file main.c menjadi seperti berikut ini
Tambahkan global variabel
uint8_t receivedData[1];Buatlah fungsi callback yang berfungsi untuk meng-handle interupsi jika ada 1 byte data yang diterima oleh mikrokontroler slave
void HAL_SPI_RxCpltCallback(SPI_HandleTypeDef *hspi) { UNUSED(hspi); // Jika variabel receivedData[0] bernilai 255 // Nyalakan LED if(receivedData[0] == 255) { HAL_GPIO_WritePin(LD3_GPIO_Port,LD3_Pin,1); } // Jika variabel receivedData[0] bernilai 0 // Matikan LED else { HAL_GPIO_WritePin(LD3_GPIO_Port,LD3_Pin,0); } }Tambahkan program berikut ini pada fungsi main, yang berfungsi untuk mengaktifkan penerimaan data melalui interrupt
int main(void) { /* MCU Configuration----------------------------------------------------------*/ /* Reset of all peripherals, Initializes the Flash interface and the Systick. */ HAL_Init(); /* Configure the system clock */ SystemClock_Config(); /* Initialize all configured peripherals */ MX_GPIO_Init(); MX_SPI2_Init(); /* Infinite loop */ while (1) { HAL_SPI_Receive_IT(&hspi2,receivedData,1); } }Lakukan kompilasi dan download program pada mikrokontroler slave
Ujicoba dapat dilakukan dengan cara yang sama seperti pada percobaan sebelumnya yaitu dengan menekan tombol user pada mikrokontroler master dan melihat nyala LED pada mikrokontroler slave
Komunikasi SPI MAX7219
Kebutuhan Komponen
- Sistem Minimum STM32F4Discovery 1 unit
- Modul 7 Segment Display MAX7219 1 unit
- Kabel Jumper Male-Female secukupnya
Gambar Percobaan
Langkah Percobaan
Buatlah project baru menggunakan STM32Cube MX. Aktifkan peripheral SPI2 dengan mode Full-Duplex Master.

Lakukan konfigurasi GPIO pada pin PB12 menjadi output

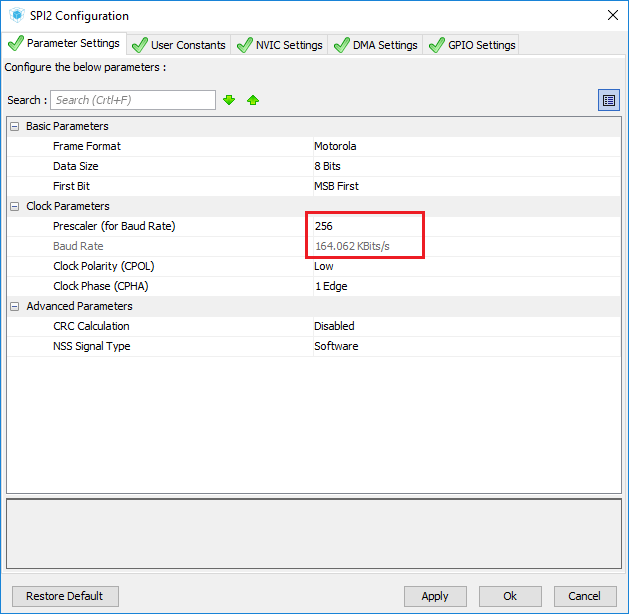
Lakukan konfigurasi pada peripheral SPI2. Aturlah nilai prescaler menjadi 256, sehingga kecepatan transfer data menjadi 164.062 KBps
Pada menu konfigurasi GPIO ubahlah label pada pin PB12 menjadi SPI2_SS

Ubahlah program pada file main.c menjadi seperti berikut ini
Tambahkan definisi alamat register MAX7219#define OP_NOOP 0 #define OP_DIGIT0 1 #define OP_DIGIT1 2 #define OP_DIGIT2 3 #define OP_DIGIT3 4 #define OP_DIGIT4 5 #define OP_DIGIT5 6 #define OP_DIGIT6 7 #define OP_DIGIT7 8 #define OP_DECODEMODE 9 #define OP_INTENSITY 10 #define OP_SCANLIMIT 11 #define OP_SHUTDOWN 12 #define OP_DISPLAYTEST 15Tambahkan deklarasi variabel
uint8_t max7219Data[2]; uint8_t charTable[] = {0x7E,0x30,0x6D,0X79,0X33,0x5B,0x5F,0x70,0x7F,0x7B};Tambahkan fungsi untuk mengirim data ke MAX7219
void max7219Write(uint8_t address, uint8_t data) { HAL_GPIO_WritePin(SPI2_SS_GPIO_Port, SPI2_SS_Pin, GPIO_PIN_RESET); max7219Data[0] = address; max7219Data[1] = data; HAL_SPI_Transmit(&hspi2,max7219Data,2,1); HAL_GPIO_WritePin(SPI2_SS_GPIO_Port, SPI2_SS_Pin, GPIO_PIN_SET); HAL_Delay(1); }Ubahlah program pada fungsi main menjadi seperti berikut ini
int main(void) { int counter = 0; /* MCU Configuration----------------------------------------------------------*/ /* Reset of all peripherals, Initializes the Flash interface and the Systick. */ HAL_Init(); /* Configure the system clock */ SystemClock_Config(); /* Initialize all configured peripherals */ MX_GPIO_Init(); MX_SPI2_Init(); max7219Write(OP_SHUTDOWN, 0x00); max7219Write(OP_DISPLAYTEST, 0x00); max7219Write(OP_INTENSITY, 0x0F); max7219Write(OP_SHUTDOWN, 0x01); uint8_t digit7, digit6, digit5, digit4, digit3, digit2, digit1, digit0; int modDigit7, modDigit6, modDigit5, modDigit4, modDigit3, modDigit2, modDigit1; while (1) { counter++; digit7 = counter / 10000000; modDigit7 = counter % 10000000; digit6 = modDigit7 / 1000000; modDigit6 = modDigit7 % 1000000; digit5 = modDigit6 / 100000; modDigit5 = modDigit6 % 100000; digit4 = modDigit5 / 10000; modDigit4 = modDigit5 % 10000; digit3 = modDigit4 / 1000; modDigit3 = modDigit4 % 1000; digit2 = modDigit3 / 100; modDigit2 = modDigit3 % 100; digit1 = modDigit2 / 10; modDigit1 = modDigit2 % 10; digit0 = modDigit1 % 10; max7219Write(OP_DIGIT7, charTable[digit7]); max7219Write(OP_DIGIT6, charTable[digit6]); max7219Write(OP_DIGIT5, charTable[digit5]); max7219Write(OP_DIGIT4, charTable[digit4]); max7219Write(OP_DIGIT3, charTable[digit3]); max7219Write(OP_DIGIT2, charTable[digit2]); max7219Write(OP_DIGIT1, charTable[digit1]); max7219Write(OP_DIGIT0, charTable[digit0]); HAL_Delay(500); } }Lakukan kompilasi dan download program ke mikrokontroler.
Ujicoba percobaan dengan cara menghubungkan mikrokontroler dengan modul 7 segment display MAX7219. 7 Segment akan menampilkan nilai variabel counter yang menghitung naik secara terus menerus.